Materiales utilizados:
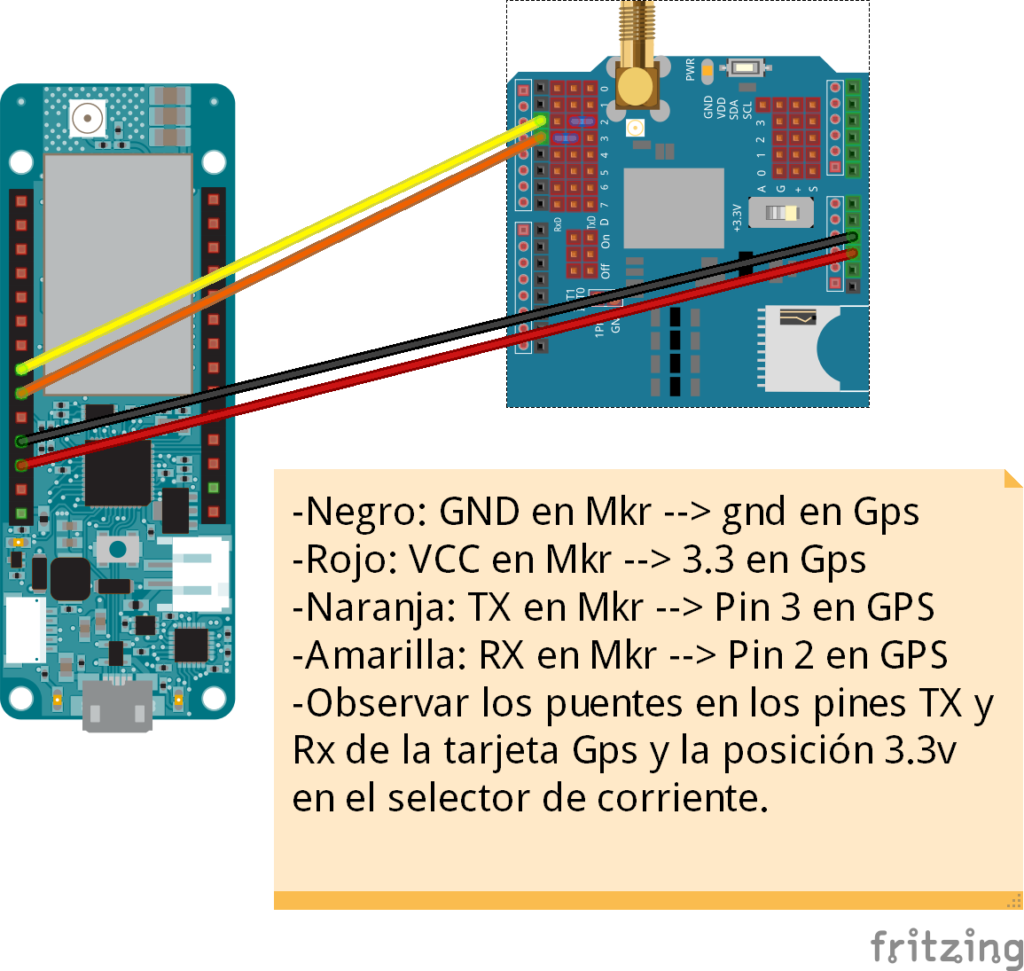
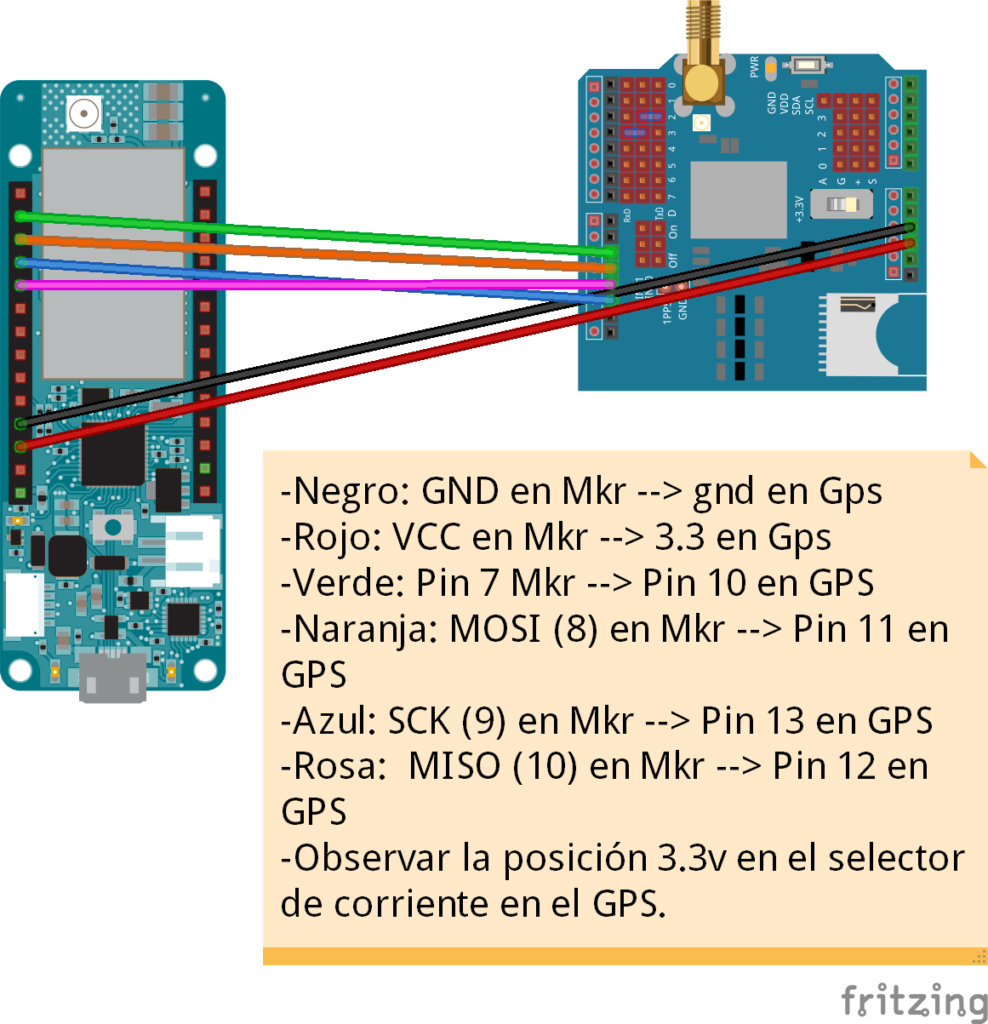
Conexionado:
Descripción de la aplicación:
En cierta aplicación, necesito usar el almacenamiento en la tarjeta SD que puede alojar la ITEAD GPS Shield 1.1, para ello, realizo el cableado como se indica en la imagen. La aplicación almacena un contador cada segundo desde 1 hasta 100, con lo que en la tarjeta ha de almacenarse en un fichero llamado log.txt una lista con los 100 numeros. Observese que el cable verde CS (chipSelect) ha de indicarse en la aplicación en qué pin está pinchado, en este caso en el 7.
Código de la aplicación:
#include <SD.h>
#include <SPI.h>
const int chipSelect = 7;
int contador = 0;
int i = 0;
void setup() {
Serial.begin(9600);
Serial.print("Inicializando tarjeta SD...");
pinMode(chipSelect,OUTPUT);
delay(2000);
if (!SD.begin(chipSelect))
{
Serial.print("fallo lectura de tarjeta");
delay(2000);
return;
}
Serial.print("Tarjeta SD inicializada");
delay(2000);
}
void loop() {
for(i=0; i<100; i++)
{
contador ++;
sdcard();
delay(1000);
}
}
void sdcard() {
String dataString = "";
dataString += String("Contador");
dataString +=",";
dataString += String(contador);
dataString +=",";
File dafile = SD.open("log.txt",FILE_WRITE);
if (dafile) {
dafile.print(",");
dafile.println(dataString);
dafile.close();
Serial.println(dataString);
}
else {
Serial.println("error al abrir log.txt");
}
}